 | |||||||||||
|
| |||||||||||
Wireless Unmanned Tanker Robot
|
Introduction
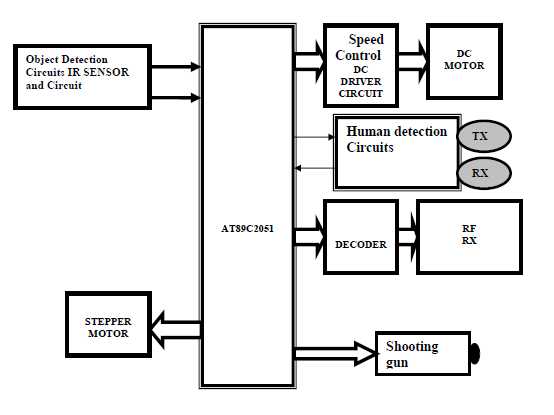
This project aims at designing control system for a robot such that the unmanned vehicle is controlled using PC and wireless RF communication. In this project the controlling is done depending on the feedback provided by the IR sensor, which is the part of objectdetection circuit. Description: The project contains different modules such as Object detection and angle determination in the path using IR sensor.
The data transmission is happened in 4-bit communication. PC key entering value is sending to RF. The value will receive into the RX-RF and compare of each value and control all steps. But IR it will work under object detection and controller will shoot . In the RF circuit design two pairs of RF transmitter and receiver are used. One set is used for communication between AT89c2051 micro controllers. Application: 1) Military (Army) Advantages: 1) Moving Object Detection of Enemy and Obstacle. Future of this System: 1) Image Process of Enemy detection
<< back |
Labels : Electrical Power Dissertation, Electrical Engineering Dissertation Proposal, PhD Dissertation Electrical Engineering, Doctoral Dissertation Electronics Engineering, PhD Dissertation Electronics Engineering, Doctoral Dissertation Electrical Engineering, Electronic Dissertation Database, Dissertation Electrical Engineering, Dissertation Ideas Electronics Communication, IEEE Thesis and Dissertation, Dissertation Topics Power Electronics, Electronics Dissertation Introduction, Electronics Engineering Thesis, Electronics Engineering Thesis Topics, Electronic Engineering Thesis PDF, Electronics Engineering Dissertation, Dissertation Topics Electronics Communication, Electronics Dissertation Ideas, Dissertation Topics in Electronics, Power Electronics Dissertation, Electronics Thesis and Dissertation, Electronics Dissertation
| Copyright © Dissertationideas.co.uk 2012 through 2014 |